行星减速机是一种用途广泛的工业产品,该减速机体积小、重量轻,承载能力高,常规使用的寿命长、运转平稳,噪声低。具有功率分流、多齿啮合独用的特性。最大输入功率可达104kW。适用于起重运输、工程机械、冶金、矿山、石油化学工业、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN子母齿轮传动减速器、弹性均载少齿差减速器。
行星减速机是一种具有广泛通用性的新性减速机,内部齿轮采用20CvMnT渗碳淬火和磨齿。整机具有结构尺寸小,输出扭矩大,速比在、效率高、性能安全可靠等特点。
相关概念级数:行星齿轮的套数.由于一套星星齿轮不足以满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.
回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是分,就是一度的六十分之一,也有人称之为背隙。行星减速机结构
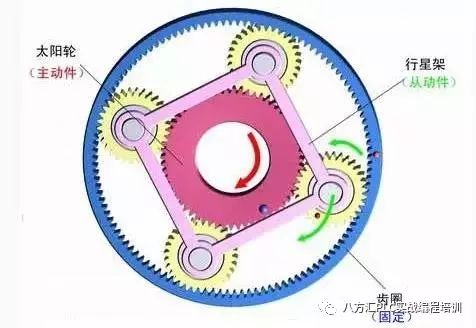
行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.下面是几款行星减速机的结构图!


1)齿圈固定,太阳轮主动,行星架被动。从图例1中能够准确的看出,此种组合为降速传动,通常传动比一般为2.5~5,转向相同。
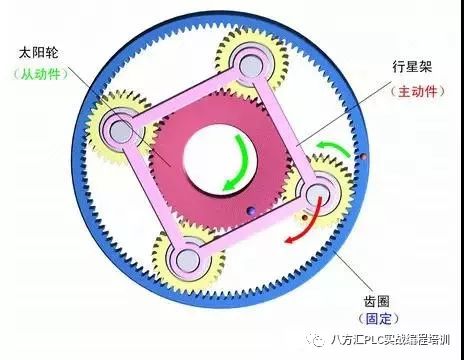
2)齿圈固定,行星架主动,太阳轮被动。从图例2中能够准确的看出,此种组合为升速传动,传动比一般为0.2~0.4,转向相同。
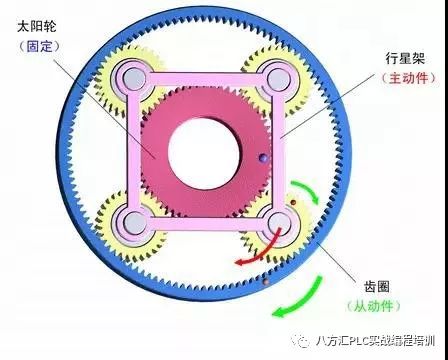
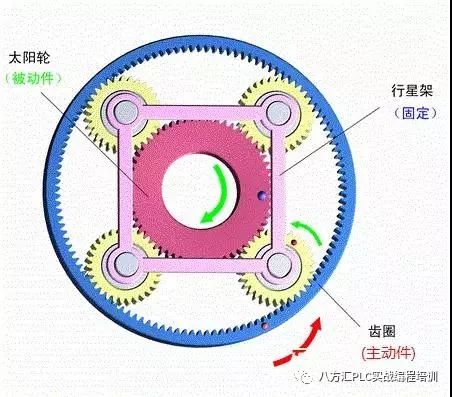
3)太阳轮固定,齿圈主动,行星架被动。从图例3中能够准确的看出,此种组合为降速传动,传动比一般为1.25~1.67,转向相同。

从演示中能够准确的看出,此种组合为升速传动,传动比一般为0.6~0.8,转向相同。
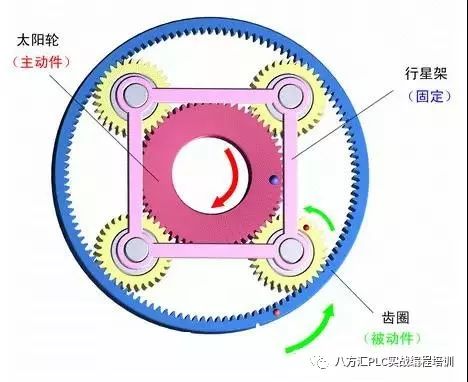
5)行星架固定,太阳轮主动,齿圈被动。从演示中能够准确的看出此种组合为降速传动,传动比一般为1.5~4,转向相反。
从演示中能够准确的看出此种组合为升速传动,传动比一般为0.25~0.67, 转向相反。
当把行星架和齿圈结合为一体作为主动件,太阳轮为被动件或者把太阳轮和行星架结合为一体作为主动件,齿圈作为被动件的运动情况。该组合行星齿轮间没有相对运动,作为一个整体运转,传动比为1,转向相同。汽车上常用此种组合方式组成直接档。
8)三元件中任一元件为主动,其余的两元件自由:从分析中可知,其余两元件无确定的转速输出。第六种组合方式, 由于升速较大,主被动件的转向相反,在汽车上通常不用这种组合。
现代工业设施应用中在高精度应用场合随着伺服电机技术的发展,从高扭矩密度乃至于高功率密度,使转速的提升高过3000rpm,由于转速的提升,使得伺服电机的功率密度大幅度的提高。这意谓着伺服电机要不要搭配减速机,其决定因素主要是从应用的需求上及成本的考虑来审视。例如,以下应用场合必须搭配伺服行星减速机。
1、重负荷高精度必须对负载做移动并要求精密定位时便有此需要。一般像是航空、卫星、医疗、军事科技、晶圆设备、机器人等自动化设备。他们的共同特征是将负载移动所需的扭矩往往远超过伺服电机本身的扭矩容量。而透过减速机来做伺服电机输出扭矩的提升,便可有效解决这一个问题。
2、提升扭矩输出扭矩提升的方式,可能采用直接增大伺服电机的输出扭矩方式,但这样的形式不但一定要使用昂贵大功率的伺服电机,电机还要有更强壮的结构,扭矩的增大正比于控制电流的增大,此时采取了比较大的驱动器,功率电子组件和相关机电设施规格的增大,又会使控制管理系统的成本大幅增加。
3、提高使用性能据了解,负载惯量的不当匹配,是伺服控制不稳定的最大原因之一。对于大的负载惯量,可通过减速比的平方反比来调配最佳的等效负载惯量,以获得最佳的控制响应。所以从这个方面来看,行星减速机为伺服应用的控制响应的最佳匹配。4、降低设备成本从成本观点,假设0.4KW的AC伺服电机搭配驱动器,需耗费一单位设备成本,以5KW的AC伺服电机搭配伺服驱动器必须耗费15单位成本,但是若采用0.4KW伺服电机与驱动器,搭配一组减速机就能达到前述耗费15个单位成本才能完成的事,在操作成本上节省50%以上。
因此,使用者可依其加工需求不同,决定选用不同安装形式的行星减速机产品。一般而言,在机台运转上有低速、高扭矩、高功率密度场合需求,绝大部分采用行星减速机。
** 伺服电动机的介绍** 伺服电动机(或称执行电动机)是自动控制系统和计算装置中大范围的应用的一种执行元件。其作用为把接受的电信号转换为电动机转轴的角位移或角速度。按电流种类的不同,伺服电动机可分为直流和交流两大类。 一、交流伺服电动机 1、结构和原理交流伺服电动机的定子绕组和单相异步电动机相似,它的定子上装有两个在空间相差90°电角度的绕组,即励磁绕组和控制绕组。运行时励磁绕组始终加上一定的交流励磁电压,控制绕组上则加大小或相位随信号变化的控制电压。转子的结构及形式笼型转子和空心杯型转子两种。 笼型转子的结构与一般笼型异步电动机的转子相同,但转子做的细长,转子导体用高电阻率的材料作成。其目的是为了减小转子的转动惯量,增加启动
“由PLC+伺服控制器+伺服电机(配套设备)+编码器(外部设备端)组成的全闭环系统,怎么来实现??我的方法是由PLC无限脉冲给伺服器,当达到一定的要求工艺位置(外部编码器连接至PLC)时PLC停止脉冲输出,但实际停连位置不够准确,大概是由于,达到位置再停止信号会因为伺服器的减速停车而误差!!” 1、楼主的论述中,认为“由PLC+伺服控制器+伺服电机(配套设备)+编码器(外部设备端)组成的全闭环系统”,电机的运转是由PLC发脉冲控制的,PLC发脉冲电机开始转,PLC发脉冲快,电机就转得快,……; 2、楼主的这个理解是错误的,不只是楼主错误,很多“专家”也是这样认为的; 3、“由PLC+伺服控制器+伺服电机(配套设备)+编码器(外部设备端
伺服电机分为交流伺服和直流伺服两大类。 交流伺服电机分类 交流伺服电机的基本构造与交流感应电动机(异步电机)相似。在定子上有两个相空间位移90°电角度的励磁绕组Wf和控制绕组WcoWf,接恒定交流电压,利用施加到Wc上的交流电压或相位的变化,达到控制电机运行的目的。交流伺服电机具有运行稳定、可控性好、响应快速、灵敏度较高以及机械特性和调节特性的非线性度指标严格(要求分别小于10%~15%和小于15%~25%)等特点。 1、异步型交流伺服电动机 异步型交流伺服电动机指的是交流感应电动机。它有三相和单相之分,也有鼠笼式和线绕式,通常多用鼠笼式三相感应电动机。其结构相对比较简单,与同容量的直流电动机相比,质量轻1/2,价格仅为直流电动机的1
机电设备中有的地方用的伺服电机。有的地方用的是步进电机,价格是相差很远的。 ** 步进电机**是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件,在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲个数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机安设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。能够最终靠控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以经过控制脉冲频率来控制电机转动的速度和加速度,进而达到高速的目的。 ** 伺服电机**又称执行电机,在自动控制系统中,用作执行元件,把收到的电信号转换成电机轴上的角位移或角速度输出
和步进电机的区别在哪? /
实物接线S-D ]A周边设备连接图 与轴助设备的连接 周边设备以如下方式与MRJ2S-A相连接。 由于配备了各类接头,选用件和其它必要设备,用户在购入后可简单迅速的装配MR-J2S-A。
实物接线图图解 /
近年来,随着以及机床市场规模逐步扩大,国内厂商凭借不断的提高技术实力,加强设备稳定性、入局者持续不断的增加,市场之间的竞争加剧。 面对这一“红海”竞争市场,山东中科伺易技术有限公司(简称:中科伺易)借助国家创新中心济宁基地的平台优势,勇于探索与创新往前多走一步,将市场切入点聚焦于微型伺服电机这一细分领域。 近日,《伺服与运动控制》杂志前往山东济宁,邀请中科伺易董事长庞超女士,请她就微型伺服电机产品特质、未来技术发展的新趋势、生产基地入驻搬迁等方面做交流与分享。 探索“少人区”,进军微型伺服电机“蓝海”市场 “尽管目前国产微型伺服市场规模依然偏小,入局者寥寥无几,属于‘少人区’,但着眼于未来3-5年,实现对国外高品质
如何正确选择和步进电机 主要视具体应用情况而定,简单地说要确定:负载的性质(如水平还是垂直负载等),转矩、惯量、转速、精度、加减速等要求,上位控制要求(如对端口界面 和通讯方面的要求),主要控制方式是位置、转矩还是速度方式。供电电源是直流还是交流电源,或电池供电,电压范围。据此以确定电机和配用驱动器或控制器的型号。 选择步进电机还是伺服电机系统? 其实,选择什么样的电机应根据具体应用情况而定,各有其特点。 印刷机械如何明智的选择步进电机和伺服电机 印刷机械的传输结构只要包括:直线电机、旋转电机、旋转马达等。其中,直线电机控制驱动板块,原点开关和磁条,读数头和编码器。旋转电机控制刹车片,旋转编码器
引言 伺服电机是工业自动化领域中常用的一种电机,具有高精度、高响应速度和高稳定性等特点。编码器作为伺服电机的重要组成部分,负责将电机的旋转位置和速度信息转换为电信号,以实现对电机的精确控制。然而,编码器在使用的过程中有极大几率会出现各种故障,影响伺服电机的正常运行。 编码器的工作原理 编码器是一种将机械位置信号转换为电信号的装置,其工作原理如下: 编码器内部有一个光栅盘,上面有等间距的透光和不透光的条纹。 光栅盘两侧分别安装有光源和光电传感器。 当编码器旋转时,光栅盘上的透光条纹会依次通过光源和光电传感器,产生脉冲信号。 通过计算脉冲信号的数量和频率,能够获得编码器的旋转位置和速度信息。 编码器的故障原因 编码器在使用
东芝1200V SIC SBD “TRSxxx120Hx系列” 助力工业电源设备高效
2024 瑞萨电子MCU/MPU工业技术研讨会——深圳、上海站, 火热报名中
Follow me第二季第4期来啦!与得捷一起解锁蓝牙/Wi-Fi板【Arduino Nano RP2040 Connect】超能力!
嵌入式工程师AI挑战营(进阶):基于RV1106部署InsightFace算法,实现多人的实时人脸识别
瑞萨推出包括先进可编程14位SAR ADC在内的 全新AnalogPAK可编程混合信号IC系列
全新产品几乎适用于任何应用,大幅度减少元件数量、BOM成本和占板空间2024 年 11 月 12 日,中国北京讯 - 全球半导体解决方案供应商瑞 ...
交通电气化建立在创新发展的基础上,不仅在电池技术和快速充电器方面,而且在车载充电器 (OBC) 方面,这些充电器 (OBC) 支持通过更 ...
快速增长的电动汽车 (EV) 销售正在推动充电基础设施的增长,预计到 40 年,所有功率水平的年价值将达到 2030 亿美元。这将为电动汽 ...
电动汽车市场是碳化硅(SiC)设备制造商最大和增长最快的商机之一。根据国际能源署 (IEA) 的数据,2020 年全球道路上有 1 万辆电动 ...
电动汽车(EV)和混合动力电动汽车(HEV)正在迅速超越汽车市场,随着这些新车的出现,对车载和非车载充电系统的需求也在增加。然而,这些 ...

嵌入式处理器嵌入式操作系统开发相关FPGA/DSP总线与接口数据处理消费电子工业电子汽车电子其他技术存储技术综合资讯论坛电子百科






